Lecture 02-03 线性代数基础与线性变换
线性代数基础
-
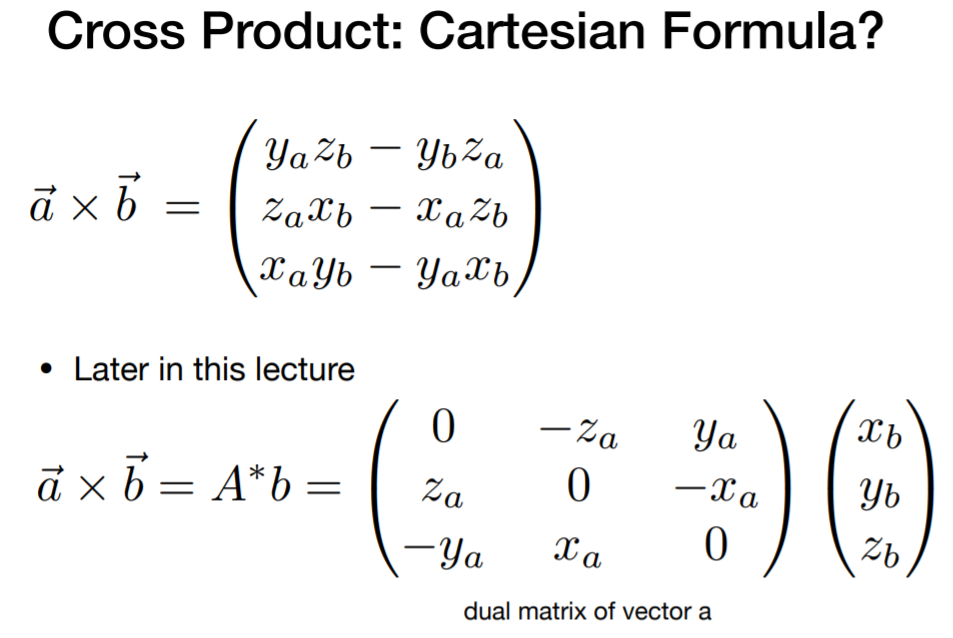
叉乘计算公式(两个向量的叉积等价于一个矩阵与一个向量的乘积)
-
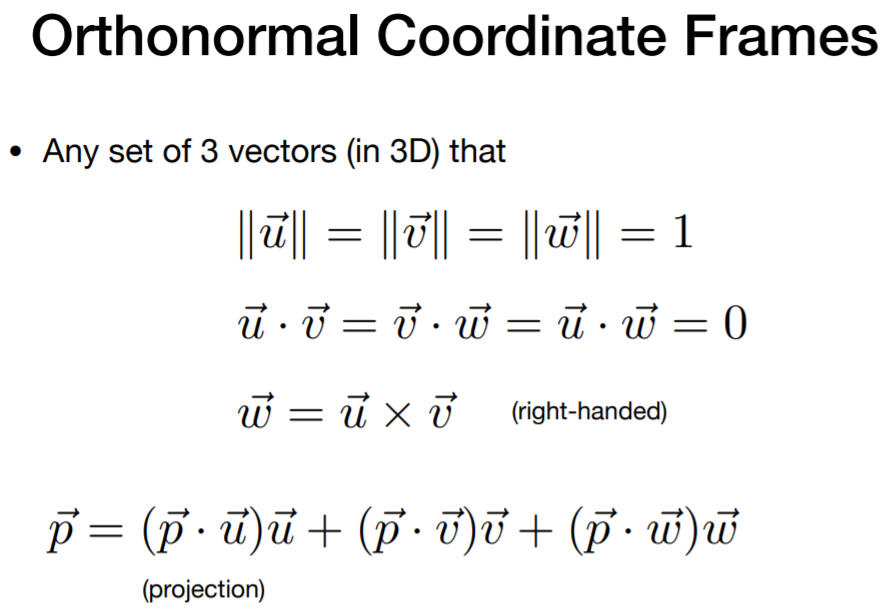
任意向量在三维坐标中的分解(该向量在三个基方向上的投影之和)
-
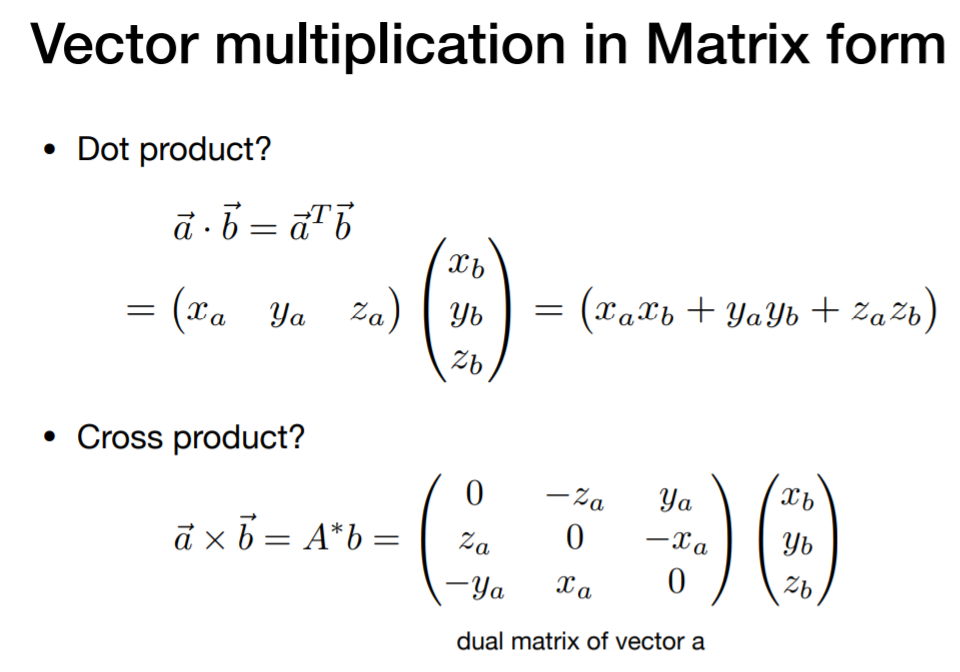
向量与矩阵的联系
线性变换
-
基本概念
- 如果 (E 为单位矩阵)或 ,则 n 阶实矩阵 A 称为正交矩阵
- 设 A 是一个 n 阶矩阵,若存在另一个 n 阶矩阵 B,使得: ,则称方阵 A 可逆,并称方阵 B 是 A 的逆矩阵
-
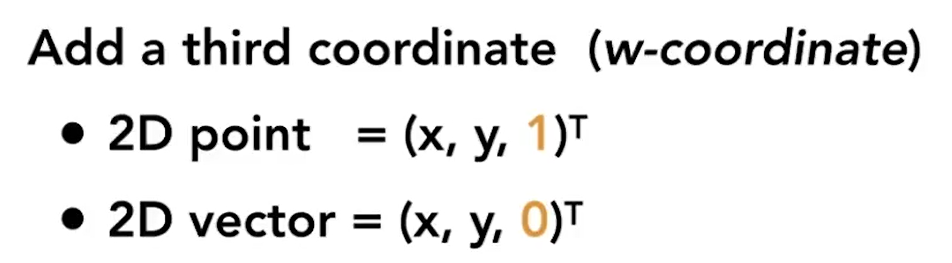
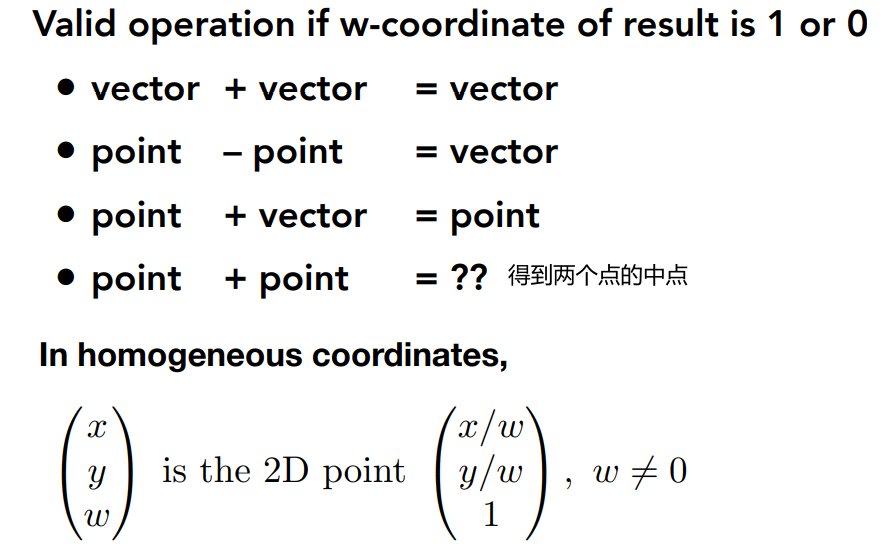
齐次坐标的目的:将线性变换(压缩、旋转等)和非线性变换(平移)都用一个变换矩阵来表示。向量和点的区别:3D 向量的第 4 个代数分量是 0,而 3D 点的第 4 个代数分量是 1。
-
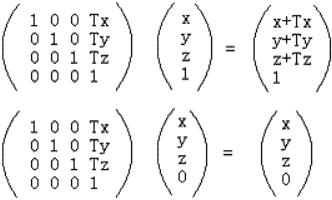
投影变换(projection transformation)是将一种地图投影点的坐标变换为另一种地图投影点的坐标的过程。研究投影点坐标变换的理论和方法。
-
从中可以思考得知,对于平移 T、旋转 R、缩放 S 这 3 个最常见的仿射变换,平移变换只对于点才有意义,因为普通向量没有位置概念,只有大小和方向
-
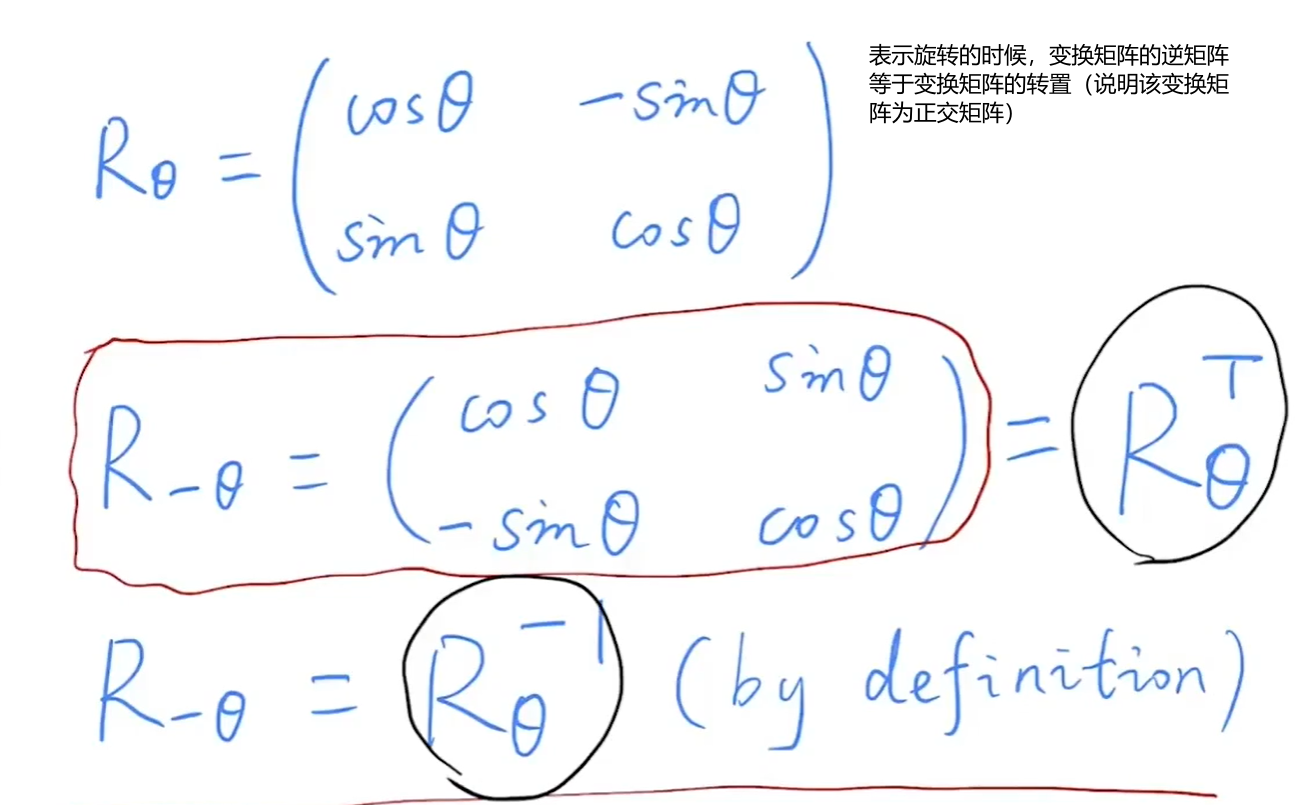
表示旋转的时候,变换矩阵的逆矩阵等于变换矩阵的转置(说明该变换矩阵为正交矩阵)
-
如何判断一个点是否在三角形中?
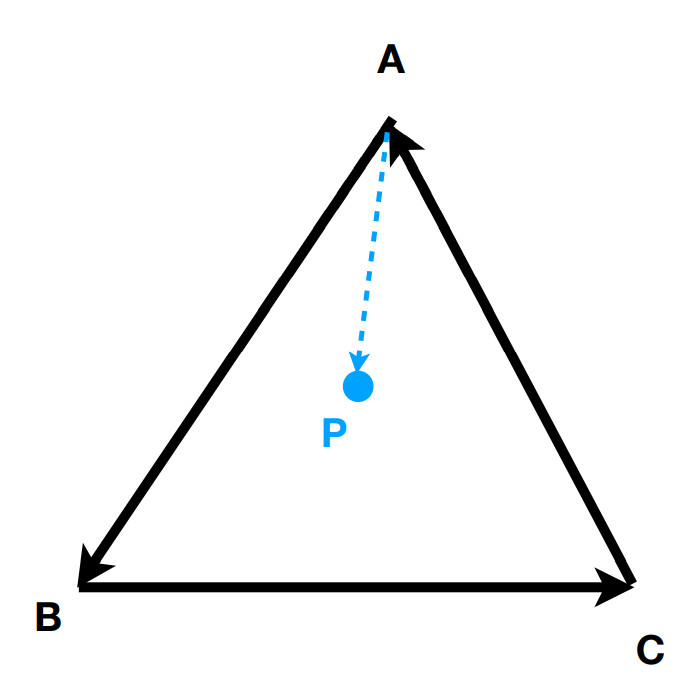
按照逆时针方向连接三个顶点形成三个向量:、、,计算它们的结果是否同号(同为正或者同为负),是,则在三角形内部。
本博客所有文章除特别声明外,均采用 CC BY-SA 4.0 协议 ,转载请注明出处!